|
I am rising fifth year Ph.D. Candidate and Annenburg Fellow at University of Southern California, where I work at HaRVI lab advised by Prof. Heather Culbertson studying human-robot interaction, wearable device and haptics in social touch. I received my Bachelor's Degree in Computer Science from Beijing Jiaotong University in 2017, where I was advised by Prof. Youfang Lin. My previous research experience includes Data Mining, Ditributed System when I was conducting research at BJTU INSIS Lab and now I am focusing on understanding human touch perception with wearable technology, integrating control algorithms with haptics and exploring multi-modality mediated social touch. There is a chinese saying "十年树木,百年树人", which means "It takes ten years to grow a tree, but a hundred years to cultivate a person". Education has been a lifelong passion of mine and my family. Through education we cultivate the future leaders of our society. I have been mentoring 100+ students in the past 10 years, and the journey continues with the goal of providing educational resources to students in need, and to help them achieve their dreams. We shape the future through education.My overarching career ambition is to integrating haptic and robotic technology seamlessly into every household., and I am deeply appreciative of everyone who has supported me on this journey. Go together, go far, please feel free to reach out to me if you have any idea. Email / LinkedIn / X / Google Scholar / |

|
|
I'm interested in Social Touch, Human-Robot Interaction, Touch Perception Understanding, Haptic System Design. Representative papers are highlighted. |
|
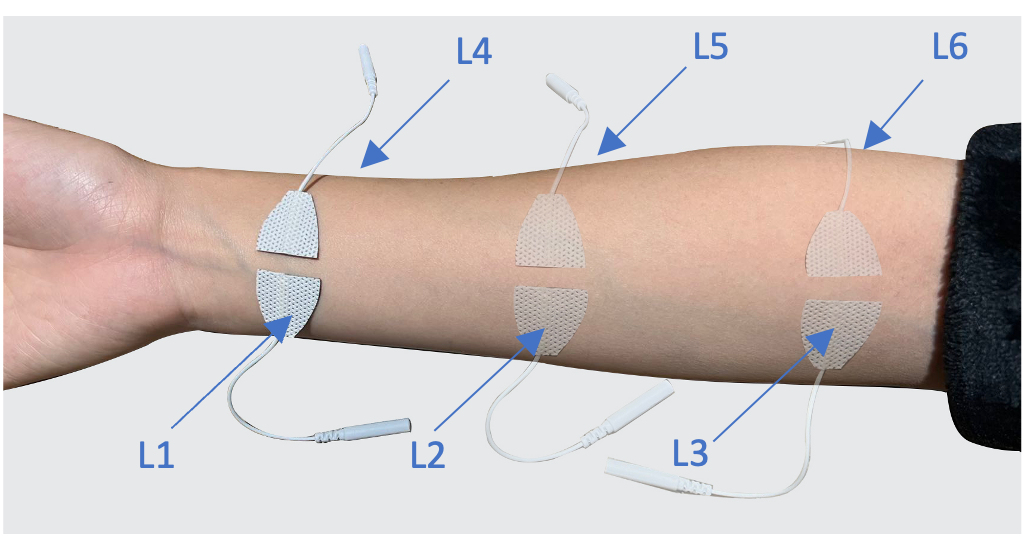
Xin Zhu, Xinlei Yu, Xiaopan Zhang, Shruti , Pranavi, Heather Culbertson, In Progress, 2023 Previous studies on electrotactile perception have developed models to explain the relationship between physical and electrical parameters and perceived sensation, but there is no consensus due to the different implementation of stimulation systems. We aim to gain a deeper understanding of electrotactile perception by examining the effects of feedback location and frequency on perception. |
|
Xin Zhu, Nikhil Kanatala, Heather Culbertson, In Progress, 2023 Previous studies on electrotactile perception have developed models to explain the relationship between physical and electrical parameters and perceived sensation, but there is no consensus due to the different implementation of stimulation systems. We aim to gain a deeper understanding of electrotactile perception by examining the effects of feedback location and frequency on perception. |
|
Xin Zhu, Heather Culbertson, Work In Progress, 2023 We proposed a novel method to abstract the wearable haptic device into a structural model, further detail will be released soon. |
|
|
Xin Zhu, Heather Culbertson, Work In Progress, 2023 Novel method to create touch sensation, further detail will be released soon. |
|
|
Xin Zhu, Zhenghui Su, Heather Culbertson, Paper Inpreparation, 2023 Novel Haptic system understands the human perception, further detail will be released soon. |
|
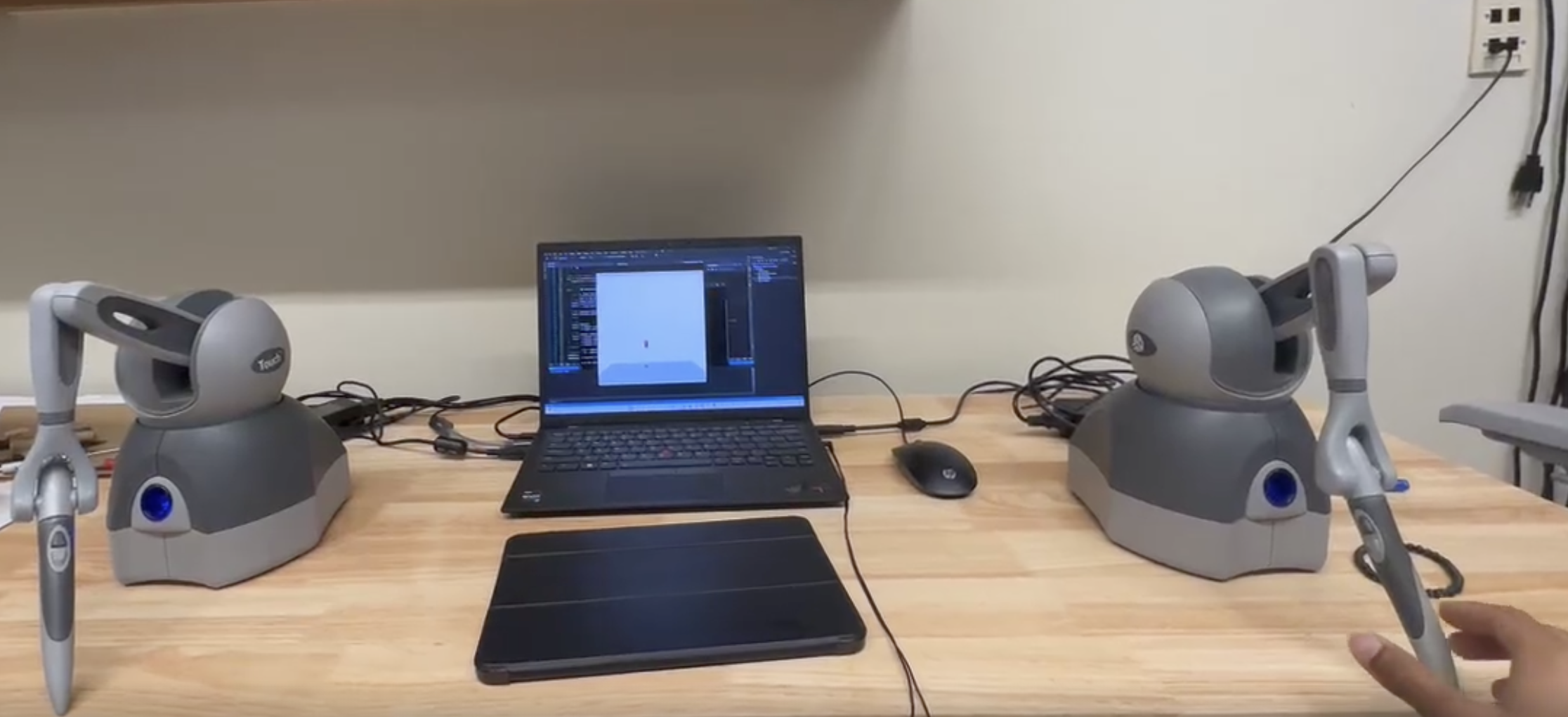
Pranavi Jalapati, Selwa Sweidan, Xin Zhu, Heather Culbertson, ACII, 2023 We explore affective context as a combination of user relationships (specifically the closeness between pairs of users) and user culture. We share the design and implementation of the crossmodal system that takes up to ten seconds of vocal expression (including humming or singing) from one user and transposes it into haptic signals to be displayed to twelve vibration actuators worn on the forearm of the second user. |
|
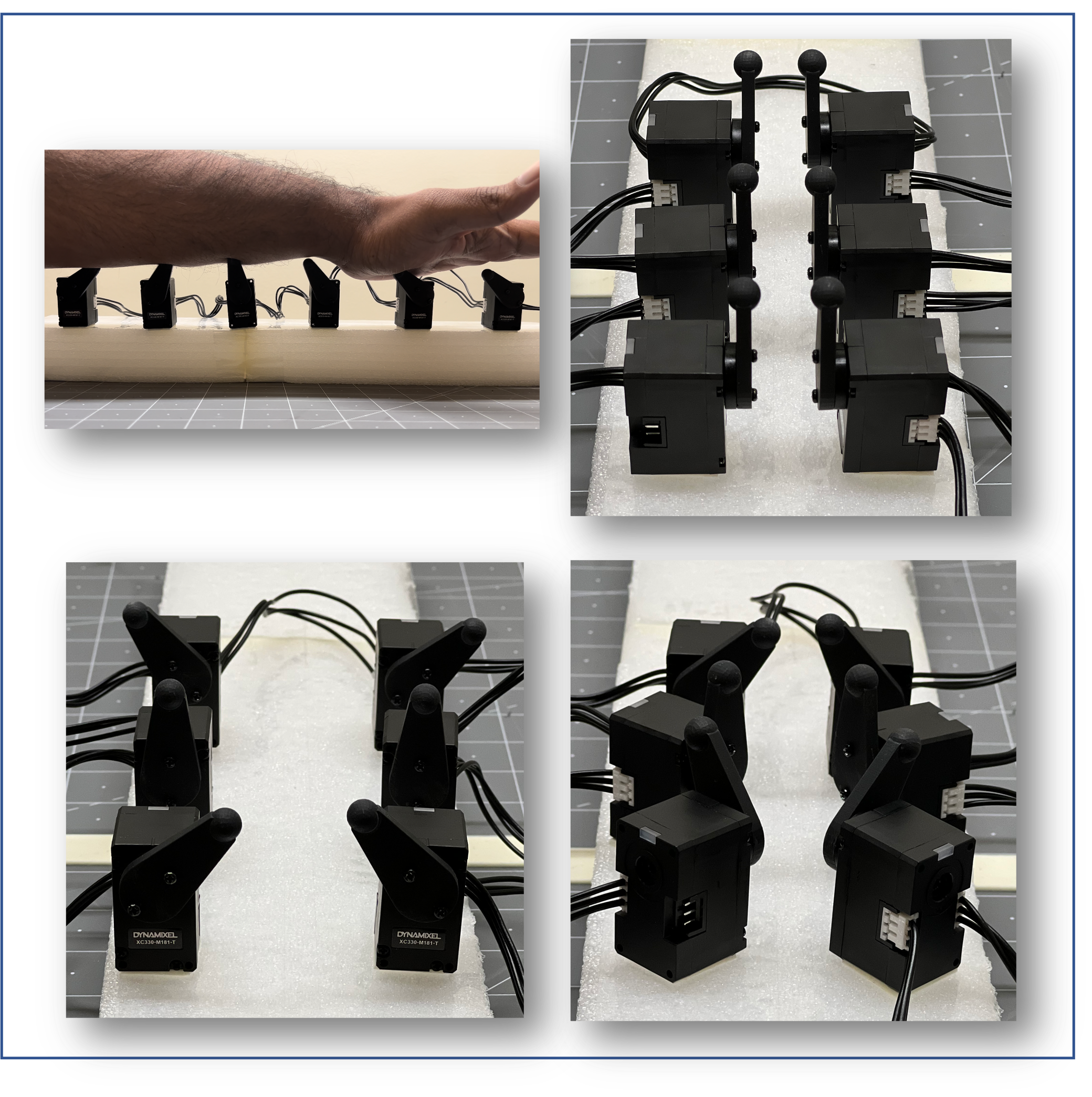
Xin Zhu, Zhenghui Su, Heather Culbertson, WHC Demo, 2023 Paper Inpreparation The Interactive Servo Matrix (ISM) is a novel system designed to generate complex touch gestures using an adaptable matrix of servo motors. |
|
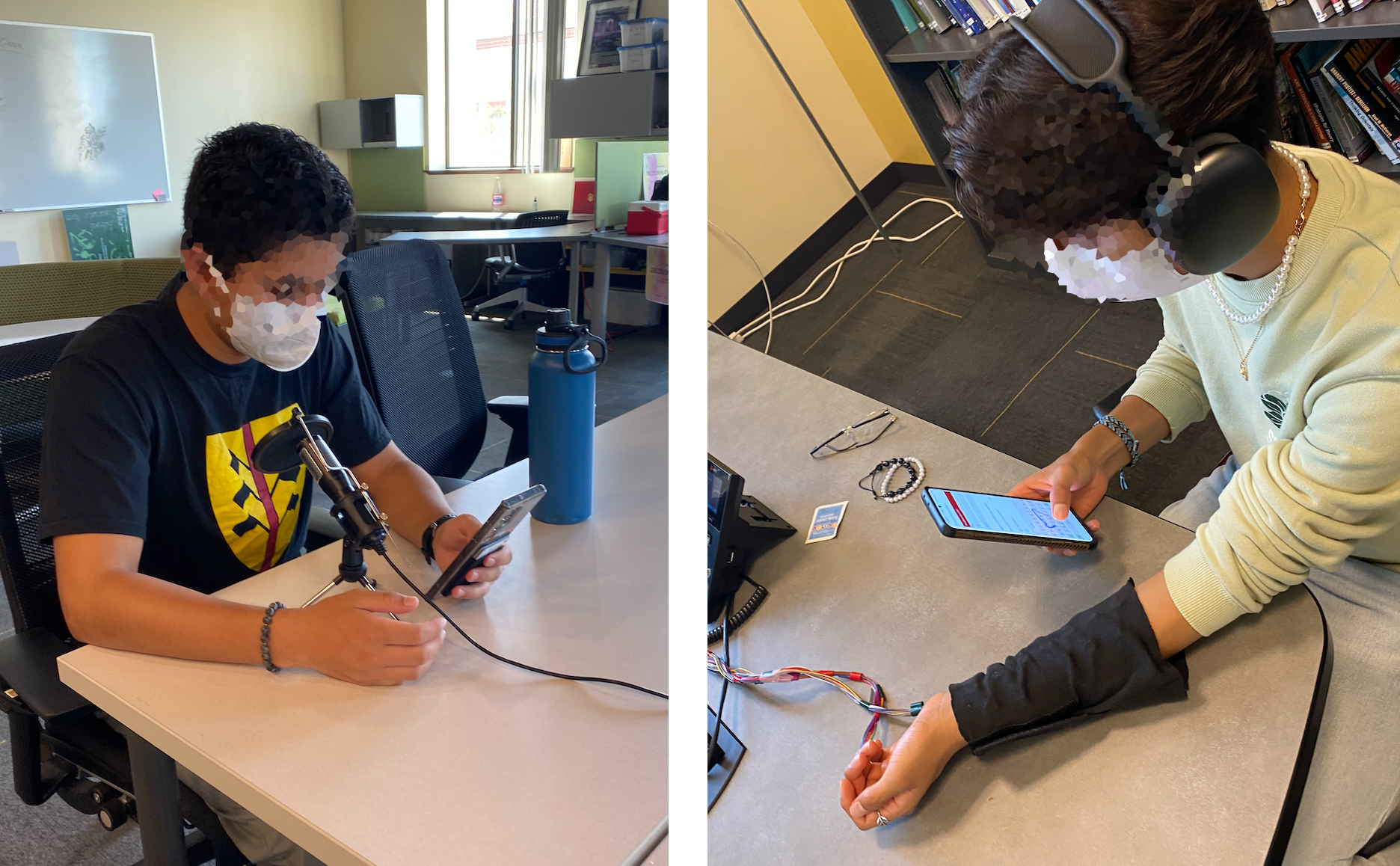
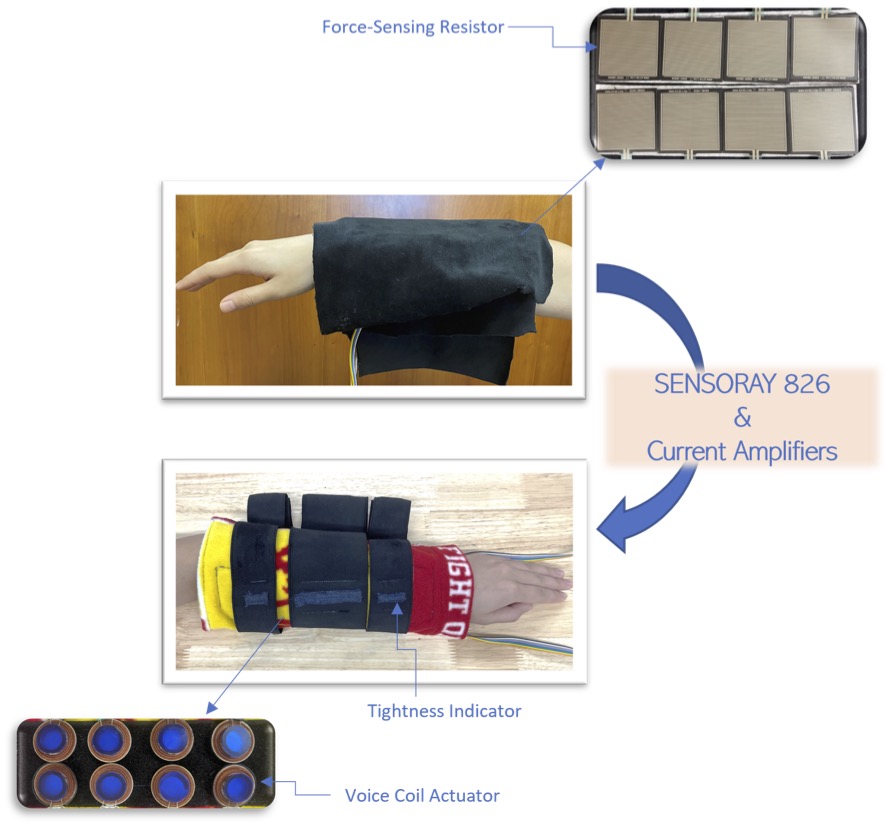
Xin Zhu, Tiantian Feng, Heather Culbertson, Frontiers in Computer Science, 2022 Wearable System that can sense human touch and recreate the touch sensation, explored gesture mapping algorithm and speed effect on emotion perception. |
|
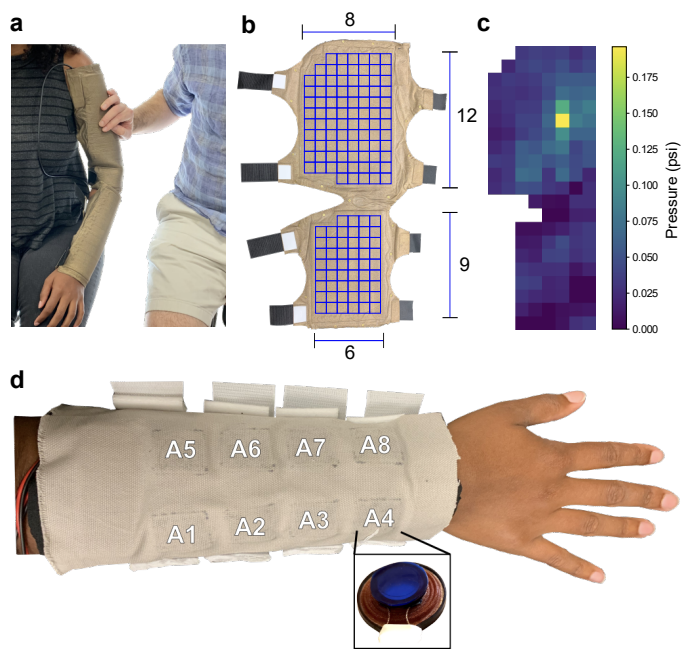
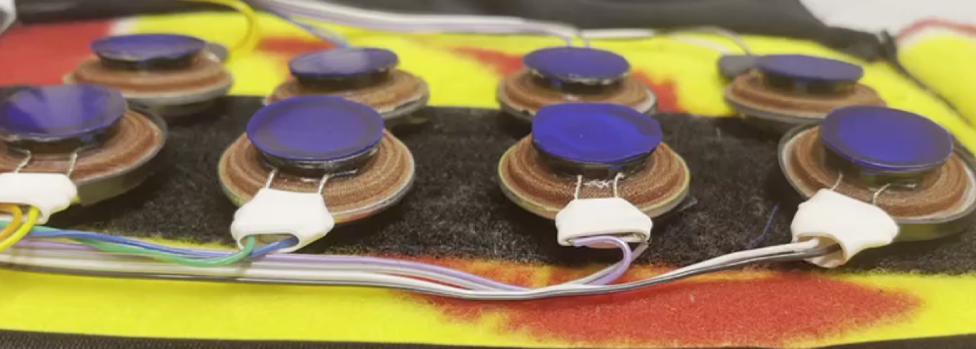
Mike Salvato, Sophia R. Williams, Cara M. Nunez, Xin Zhu, Ali Israr, Frances Lau, Keith Klumb, Freddy Abnousi, Allison M. Okamura, Heather Culbertson, IEEE Transation of Haptics, 2022 Data-driven sparse skin stimulation can convey social touch information to human |
|
Xin Zhu, Tiantian Feng, Heather Culbertson, WHC Demo, 2021 Wearable System that can sense human touch and recreate the touch sensation using force mapping and Voice Coil actuators. |
|
|

|
Feel free to steal this website's source code, just add a link back to Jon's website. |